7. 模型训练
上一章讨论了大语言模型 Transformer
的模型结构,本章节将讨论如何训练大语言模型,主要包含
目标函数 和 优化算法 两部分。
7.1 目标函数
我们研究三类语言模型的目标函数:
- 只包含解码器(Decoder-only)的模型(例如,GPT-3):计算单向上下文嵌入(contextual embeddings),一次生成一个token
- 只包含编码器(Encoder-only)的模型(例如,BERT):计算双向上下文嵌入
- 编码器解码器(Encoder-decoder)模型(例如,T5):编码输入,解码输出
我们可以使用任何模型将 token
序列映射到上下文嵌入中:
\phi : V^L \to \mathbb{R}^{d \times L}.
\left[\text{the}, \text{mouse}, \text{ate}, \text{the}, \text{cheese}\right] \stackrel{\phi}{\Rightarrow} \left[\binom{1}{0.1}, \binom{0}{1}, \binom{1}{1}, \binom{1}{-0.1}, \binom{0}{-1} \right].
7.1.1 Decode-only 模型
在自回归语言模型中,我们定义了一个条件分布: p(x_i \mid x_{1:i-1}). 其定义如下:
- 将 x_{1:i-1} 映射到上下文嵌入 \phi(x_{1:i-1})。
- 应用嵌入矩阵 E \in \R^{V \times d}
来获得每个
token的得分 E \phi(x_{1:i-1})_{i-1}。 - 对其进行指数化和归一化,得到预测 x_i 的分布。
简洁地: p(x_{i+1} \mid x_{1:i}) = softmax(E \phi(x_{1:i})_i). 设 \theta 是大语言模型的所有参数,D 是由一组序列组成的训练数据。然后,借助最大似然原理,可以定义以下负对数似然目标函数: O(\theta) = \sum_{x \in D} - \log p_\theta(x) = \sum_{x \in D} \sum_{i=1}^L -\log p_\theta(x_i \mid x_{1:i-1}).
7.1.2 Encoder-only 模型
7.1.2.1 BERT 模型
此处我们介绍 BERT 的目标函数,它包含两个部分:
- 掩码语言模型(Masked language modeling)
- 下一句预测(Next sentence prediction)
以自然语言推理(预测隐含、矛盾或中性)任务中的序列为例: x_{1:L} = [\text{[CLS]}, \text{all}, \text{animals}, \text{breathe}, \text{[SEP]}, \text{cats}, \text{breathe}]. 其中有两个特殊的token:
- \text{[CLS]}:包含用于驱动分类任务的嵌入
- \text{[SEP]}:用于告诉模型第一个序列(例如,前提)与第二个序列(例如,假设)的位置。
\text{SentenceEmbedding}(x_{1:L}) 根据序列返回以下两个矢量之一
- 对于\text{[SEP]}左边的,返回 e_A \in \mathbb{R}^d
- 对于\text{[SEP]}右边的,返回 e_B \in \mathbb{R}^d

Note:BERT-large 有 n_\text{heads} = 16 个注意头,并且 d_\text{model} = 1024,总共355M 个参数。
7.1.2.2 掩码语言模型
掩码语言模型的基本思想是通过 加噪 然后预测来进行训练:
[\text{the}, \text{[MASK]}, \text{ate}, \text{[MASK]}, \text{cheese}] \Rightarrow [\text{the}, \text{mouse}, \text{ate}, \text{the}, \text{cheese}].
更普遍地说,我们可以将其视为类似于 去噪自动编码器,其中我们映射有噪声/不完整版本 \tilde x_{1:L},并尝试重建原始 x_{1:L}。
\tilde x_{1:L} \Rightarrow x_{1:L}.
建模:首先定义模型分布。给定输入 \tilde x_{1:L}
及其上下文嵌入,模型独立地预测每个 token:
p(x_i | \tilde x_{1:L}) = \text{softmax}(E \phi(\tilde x_{1:L})_i).
掩码:定义一个(随机)噪声函数 A(\tilde x_{1:L} \mid x_{1:L}): \underbrace{x_{1:L}}_\text{original} \stackrel{A}{\Rightarrow} \underbrace{\tilde x_{1:L}}_\text{noised}.
其中,A 的定义如下:
- 假设 I \subset \{1, \dots, L\} 代表所有位置中随机的 15\%。
- 对于每个 i \in I:
- 以
0.8的概率,\tilde x_i \leftarrow \text{[MASK]} - 以
0.1的概率,\tilde x_i \leftarrow x_i - 以
0.1的概率,\tilde x_i \leftarrow \text{random word from } \mathcal{V}
- 以
减少分布偏移: 如果我们总是使用 \text{[MASK]} 来替换 I 中选定的 token,则:
- 在训练期间,输入到
BERT的都是带 \text{[MASK]} 的序列。 - 而在测试时,我们会输入没有 \text{[MASK]} 的句子,这将导致分布发生变化。一种启发式的解决方法是在 20\% 的时间内用真实单词替换。
7.1.2.3 预测下一句
由于 BERT
是在拼接好的成对句子上训练的,因下一句预测的目标是预测第二句是否跟随第一句:
$$ \begin{align*}
[\text{[CLS]}, \text{the}, \text{mouse}, \text{ate}, \text{the},
\text{cheese}, \text{[SEP]}, \text{it}, \text{was}, \text{full}]
&\Rightarrow 1. \\
[\text{[CLS]}, \text{the}, \text{mouse}, \text{ate}, \text{the},
\text{cheese}, \text{[SEP]}, \text{hello}, \text{world}]
&\Rightarrow 0.
\end{align*} $$
然后使用 \text{[CLS]} 的嵌入来做二分类。
7.1.2.4 数据集
\mathcal{D} 是按如下方式构造的一组样本 (x_{1:L}, c):
- 令 A 是语料库中的一个句子。
- 以
0.5的概率,B 是下一个橘子。 - 以
0.5的概率,B 是语料库中的一个随机句子。 - 令 x_{1:L} = [\text{[CLS]}, A, \text{[SEP]}, B]
- 令 c 表示 B 是否是下一句。
7.1.2.5 训练目标
BERT 的训练目标是:
\mathcal{O}(\theta) = \sum_{(x_{1:L},c) \in \mathcal{D}}
\underbrace{\mathbb{E}_{I, \tilde x_{1:L} \sim A(\cdot \mid x_{1:L},
I)}[\sum_{i \in I} -\log p_\theta(\tilde x_i | x_{1:L})]}_\text{masked
language modeling} + \underbrace{-\log p(c |
\phi(x_{1:L})_1)}_\text{next sentence prediction}.
7.1.2.6 总结
BERT(以及ELMo和ULMFiT)表明,一个统一的体系结构(Transformer)可以用于多个分类任务。BERT真正将NLP社区转变为预培训+微调的范式。BERT显示了深度双向上下文嵌入的重要性,尽管通过模型大小和微调策略可能会弥补这一点(p-tuning)。
相对于传统的 BERT 模型,RoBERTa
进行了以下改进:
- 删除了下一句预测这一目标函数(发现它没有帮助)。
- 使用更多数据训练(16GB文本 \to 160GB文本)。
- 训练时间更长。
通过上述努力,RoBERTa 在各种基准上显著提高了
BERT 的准确性,如在 SQuAD 上: 81.8 \to 89.4。
7.1.3 Encoder-decoder 模型
任务示例(表格生成文本): [\text{name}, \text{:}, \text{Clowns}, \text{|}, \text{eatType}, \text{:}, \text{coffee}, \text{shop}] \rightarrow [\text{Clowns}, \text{is}, \text{a}, \text{coffee}, \text{shop}].
7.1.3.1 BART (Bidirectional Auto-Regressive Transformers)
BART (Lewis et al. 2019)
是基于 Transformer 的编码器-解码器模型。
- 使用与
RoBERTa相同的编码器架构(12层,隐藏维度1024)。 - 使用与
RoBERTa相同的数据进行训练(160GB 文本)。
BART 使用了以下变换 A(\tilde
x_{1:L} \mid x_{1:L}):
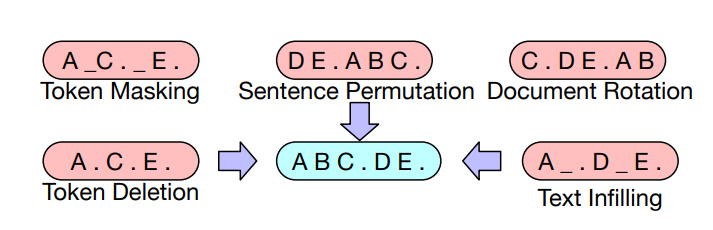
基于 BERT 的实验,最终模型进行以下了变换:
- 掩码文档中 30\% 的
token - 将所有子句打乱
最后,通过微调,BART
在分类和生成任务上都展示了强大的效果。
7.1.3.2 T5 (Text-to-Text Transfer Transformer)
T5 (Raffel et al.,
2020) 是另一种基于 Transformer
的编码器-解码器模型。
预训练任务: 给定一段文本,在随机位置将其分割为输入和输出: [\text{the}, \text{mouse}] \Rightarrow [\text{ate}, \text{the}, \text{cheese}].
论文尝试了许多不同的无监督目标:

并发现 “i.i.d. noise, replace spans”
效果最好(尽管许多目标相似)。论文还将所有经典的 NLP
任务放在一个统一的框架中,称为 Text-to-Text 任务:
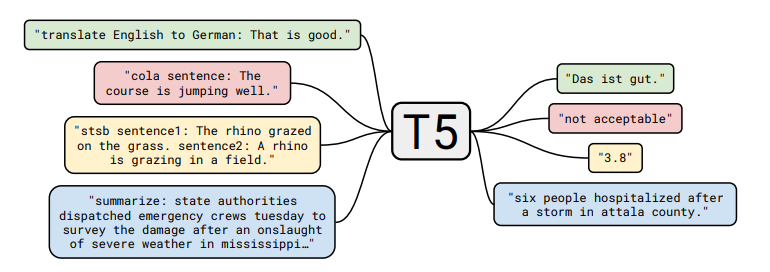
以分类任务任务为例,不同模型的差异如下:
BERT使用 \text{[CLS]} 的嵌入来预测。- T5、GPT-2、GPT-3 等(生成模型)将分类任务转换成自然语言生成。
注意:
- 论文对整个
pipline的许多方面(数据集、模型大小、训练目标等)进行了深入研究。 - 基于这些见解,他们训练了一个
11B的模型。
7.2 优化算法
现在,我们将注意力转向如何优化目标函数。
为了简单起见,让我们以自回归语言模型为例: O(\theta) = \sum_{x \in D} -\log p_\theta(x).
7.2.1 随机梯度下降(SGD)
最简单的优化算法是用小批量进行随机梯度下降,该算法的步骤如下:
初始化参数 \theta_0
重复以下步骤:
- 采样小批量 B_t \subset D
- 根据梯度更新参数:
\theta_t \leftarrow \theta_{t-1} - \eta \frac{1}{|B_t|} \sum_{x \in B_t} \nabla_\theta (-\log p_\theta(x)).
关键目标是:
- 希望参数 \theta 可以快速收敛
- 希望优化在数值上是稳定的
- 希望内存高效(尤其是对于大模型)
这些点往往相互矛盾(例如,通过低精度训练,可以实现快速收敛、减少内存占用,但是会导致训练不稳定)
因此,可以从几个层次来进行优化:
- 针对经典优化:二阶方法、约束优化等。
- 针对机器学习:随机方法、隐式正则化+早停法
- 针对深度学习:初始化、归一化(更改模型架构)
- 针对大语言模型:由于稳定性问题,学习率和一些直觉(例如,二阶方法)仍然有用,但要使大语言模型有效训练,还需要克服许多其他独特的挑战。不幸的是,其中大部分内容都是特别的,人们对此了解甚少。
7.2.2 Adam (adaptive moment estimation)
Adam 算法拥有以下两个创新:
- 引入动量(继续朝同一方向移动)。
- 参数 \theta_0 的每个维度都有一个自适应(不同)的步长(受二阶方法启发)。
它的步骤如下:
初始化参数 \theta_0
初始化动量 m_0, v_0 \leftarrow 0
重复以下步骤:
采样小批量 B_t \subset D
按照如下步骤更新参数:
- 计算梯度
g_t \leftarrow \frac{1}{|B_t|} \sum_{x \in B_t} \nabla_\theta (-\log p_\theta(x)).
- 更新一阶、二阶动量
m_t \leftarrow \beta_1 m_{t-1} + (1 - \beta_1) g_t \\ v_t \leftarrow \beta_2 v_{t-1} + (1 - \beta_2) g_t^2
- 对偏差进行修正
\hat m_t \leftarrow m_t / (1 - \beta_1^t) \\ \hat v_t \leftarrow v_t / (1 - \beta_2^t)
- 更新参数
\theta_t \leftarrow \theta_{t-1} - \eta \, \hat m_t / (\sqrt{\hat v_t} + \epsilon).
存储占用分析:
Adam 将存储从 2 倍的模型参数(\theta_t,g_t)增加到了4倍(\theta_t,g_t,m_t,v_t)。
7.2.3 AdaFactor
AdaFactor 是一种为减少存储占用的优化算法。它有如下特点:
- 它不储存 m_t,v_t 这样的 O(m \times n) 矩阵,而是存储行和列的和 O(m + n) 并重构矩阵
- 去除动量
- 它被用来训练
T5 AdaFactor可能使训练变得困难(see Twitter thread and blog post)
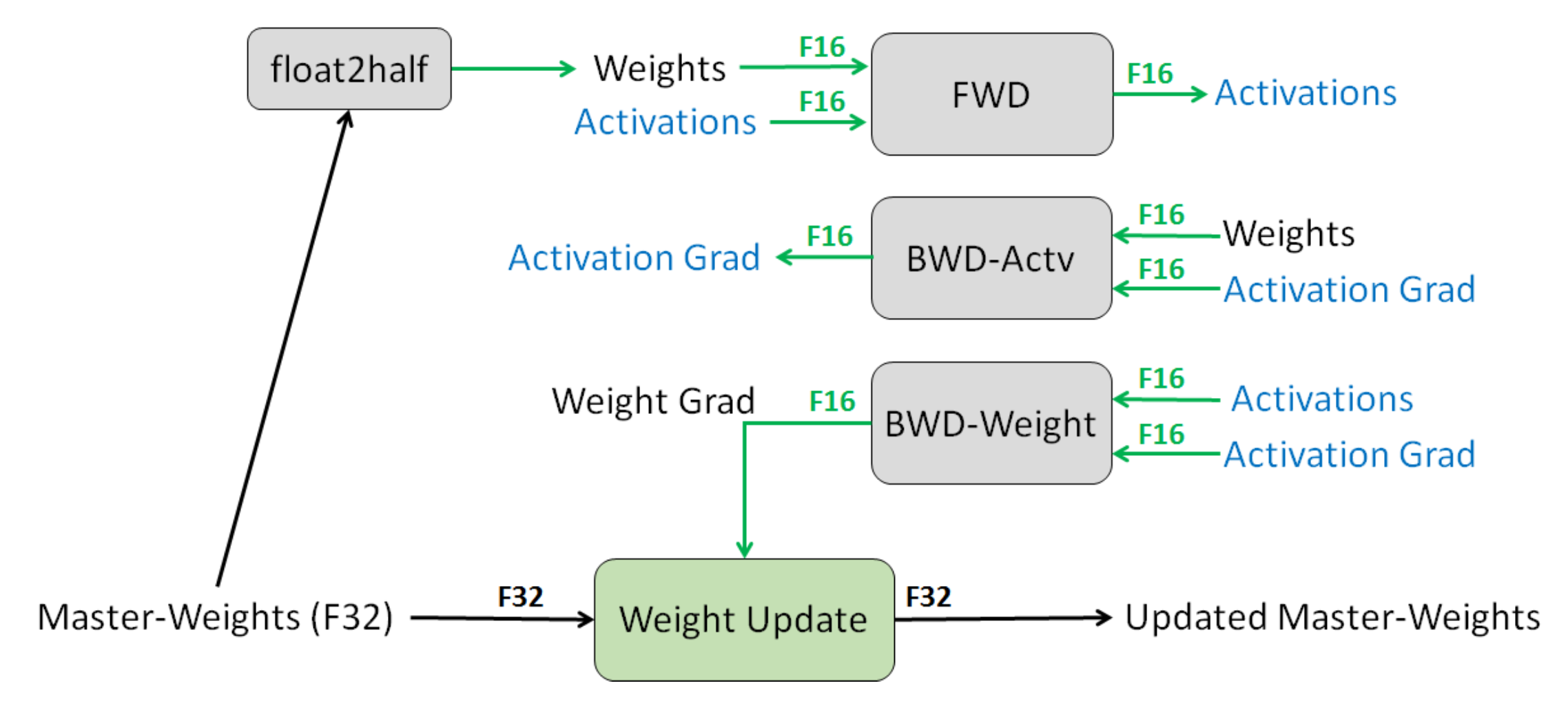
7.2.4 混合精度训练
混合精度训练 是另一种减少存储的方法
- 通常来说,默认的精度是:FP32(32位浮点)
- 其他可选精度:FP16(16位浮点),但问题是任何小于 2^{-24} 的值都会变为
0。 - 解决方案:将主权重存储在 FP32 中,并在 FP16 中执行其他所有操作。
- 损失缩放:按比例放大损失,以避免梯度数值太小。
- 结果:存储减少了一半。
7.2.5 学习率
- 通常情况下,学习率会随着时间的推移而衰减。
- 对于
Transformer模型,我们实际上需要通过预热(warmup)提高学习率。 - Huang
et al. (2020) 表明,一个潜在的原因是防止层归一化的梯度消失,导致使用
Adam优化器训练时不稳定。
7.2.6 初始化
- 给定矩阵 W \in \mathbb{R}^{m \times n},标准初始化(即,xavier 初始化)为 W_{ij} \sim N(0, 1/n)。
- GPT-2 和 GPT-3 通过额外的 \frac{1}{\sqrt{N}} 缩放权重,其中 N 是残差层的数量。
- T5将注意力矩阵增加一个\frac{1}{\sqrt{d}}(代码)。
以 GPT-3 为例,使用的参数如下:
- Adam参数:\beta_1 = 0.9, \beta_2 = 0.95, \epsilon = 10^{-8}
- 批量小:320万个token(约 1500 个序列)
- 使用梯度剪裁(g_t \leftarrow g_t / \min(1, \|g\|_2))
- 线性学习率预热(前3.75亿个token)
- 余弦学习率 衰减到 10\%
- 逐渐增加批大小
- 权重衰减设为 0.1
7.3 Reference
- 混合精度训练
- Fixing Weight Decay Regularization in Adam. I. Loshchilov, F. Hutter. 2017. 介绍了AdamW
- ELECTRA: Pre-training Text Encoders as Discriminators Rather Than Generators. Kevin Clark, Minh-Thang Luong, Quoc V. Le, Christopher D. Manning. ICLR 2020.
- DeBERTa: Decoding-enhanced BERT with Disentangled Attention. Pengcheng He, Xiaodong Liu, Jianfeng Gao, Weizhu Chen. ICLR 2020.
8. 分布式训练
近年来,深度学习被广泛应用到各个领域,包括计算机视觉、语言理解、语音识别、广告推荐等。不同的领域下的模型规模越来越大,比如 GPT-3 模型的参数量达到 1750 亿。即使用 1024 张 80 GB 的 A100,那么完整训练 GPT-3 的时长都需要1个月。
模型规模的扩大,对硬件(算力、内存)的发展提出要求。然而,因为 内存墙 的存在,单一设备的算力及容量,受限于物理定律,持续提高芯片的集成越来越困难,难以跟上模型扩大的需求。为了解决算力增速不足的问题,人们考虑用多节点集群进行分布式训练,以提升算力。因此分布式训练势在必行,也成为近些年来的流行方案。
8.1 常见的并行策略
简单的机器堆叠并不一定会带来算力的增长。因为神经网络的训练不仅需要多个设备进行计算,还涉及到设备之间的数据传输,只有协调好集群中的计算与通信,才能做高效的分布式训练。
我们将以矩阵乘法的例子,解释数据并行、模型并行的区别。先了解以下逻辑上的矩阵乘法例子:
假设神经网络中某一层是做矩阵乘法,其中的输入 x 的形状为 4\times5,模型参数 w 的形状为5\times8,那么,矩阵乘法输出形状为 4\times8。示意图如下:
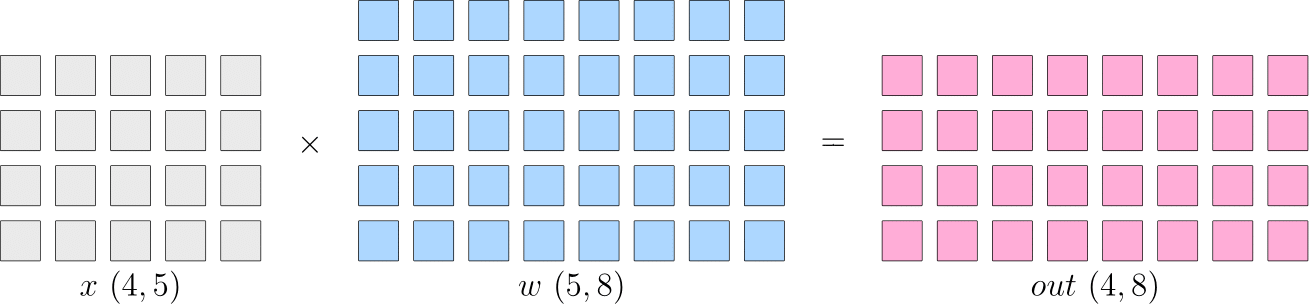
单机单卡的训练中,以上矩阵乘法,先计算得到 out,并将 out 传递给下一层,并最终计算得到loss,然后在反向传播过程中,得到 \frac{\partial loss}{\partial w},用于更新 w。
分布式训练中,依据是切分 x 还是 w 的不同,分为“数据并行”和“模型并行”策略。接下来,我们介绍常见的并行策略。
8.2.1 数据并行
数据并行,就是将数据 x 进行切分,而每个设备上的模型 w 是相同的。如下图所示,x 被按照第 0 维度平均切分到 2 个设备上,两个设备上都有完整的 w。
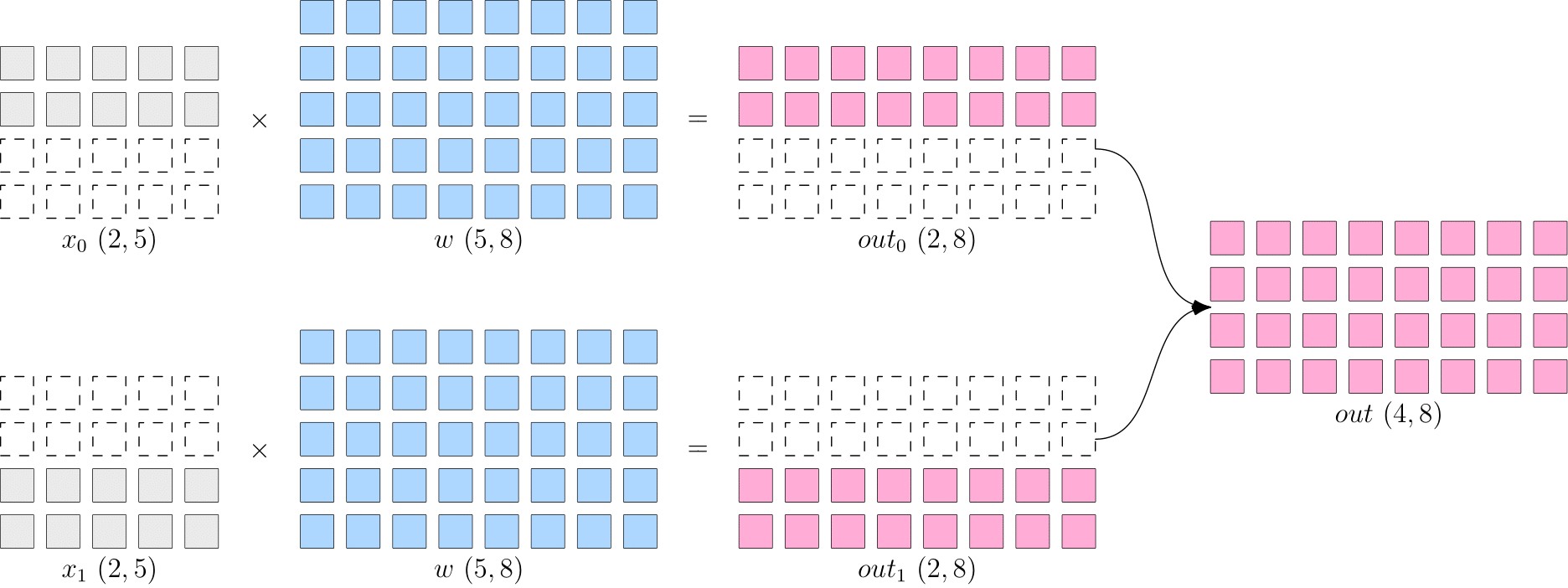
这样,在两台设备上,分别得到的输出,都只是逻辑上输出的一半(形状为 2\times8),将两个设备上的输出拼接到一起,才能得到逻辑上完整的输出。
Note:因为数据被分发到了 2 个设备上,因此反向传播过程,各自设备上得到的 \frac{\partial loss}{\partial w} 会不一样,如果直接使用各个设备上的梯度更新各自的模型,会造成 2 个设备上的模型不一致,训练就失去了意义(到底用哪个模型好呢?)。
因此,数据并行策略下,在反向传播过程中,需要对各个设备上的梯度进行 AllReduce,以确保各个设备上的模型始终保持一致。
- 当数据集较大,模型较小时,由于反向过程中为同步梯度产生的通信代价较小,此时选择数据并行一般比较有优势,常见的视觉分类模型,如
ResNet50,比较适合采用数据并行。
8.2.2 模型并行
当神经网络非常巨大,数据并行同步梯度的代价就会很大,甚至网络可能巨大到无法存放到单一计算设备中,这时候,可以采用模型并行策略解决问题。
模型并行 指每个设备上的数据是完整的、一致的,而模型 w 被切分到了各个设备上,每个设备只拥有模型的一部分,所有计算设备上的模型拼在一起,才是完整的模型。 如下图所示,w 被按照第 1 维度平均切分到 2 个设备上,两个设备上都有完整的 x。两个设备上的输出也需要通过拼接才能得到逻辑上的输出。
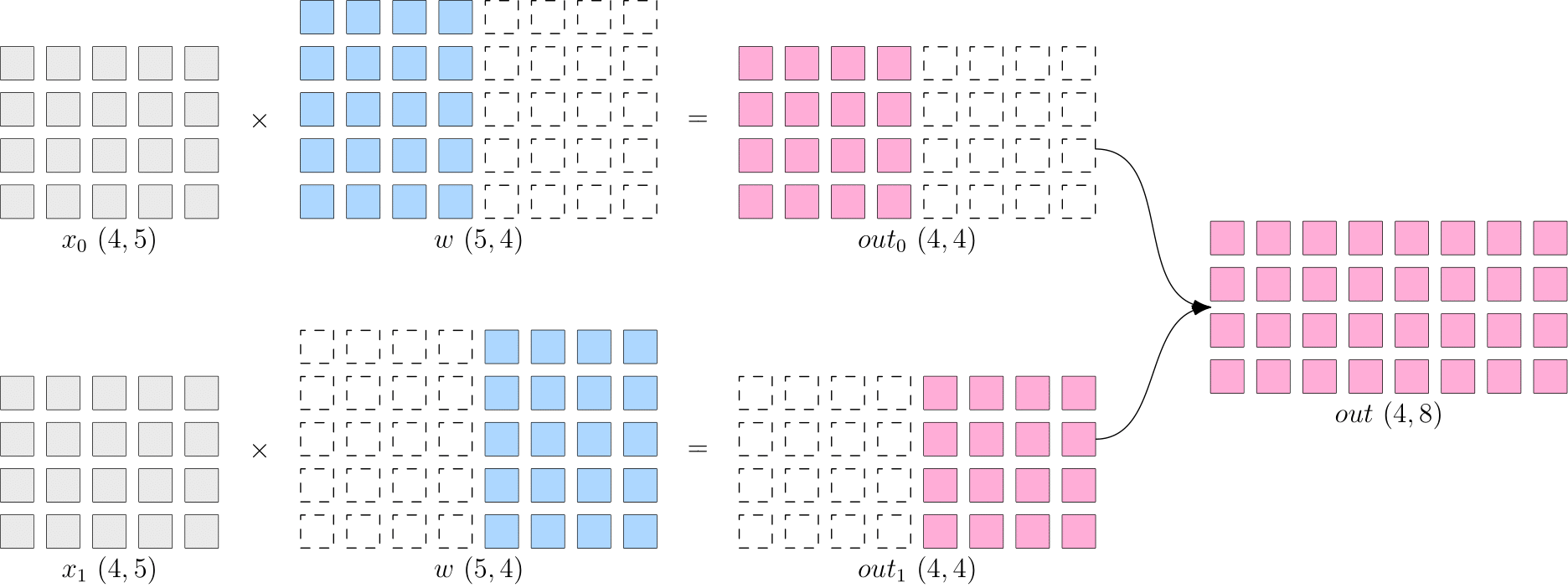
- 优点:省去了多个设备之间的梯度
AllReduce; - 缺点:由于每个设备都需要完整的数据输入,因此,数据会在多个设备之间进行广播,产生通信代价。
比如,上图中的最终得到的 out~(4\times8)
,如果它作为下一层网络的输入,那么它就需要被广播发送到两个设备上。语言模型,如
BERT,常采用模型并行。
8.2.3 流水并行
当神经网络过于巨大,无法在一个设备上存放时,除了上述的模型并行的策略外,还可以选择流水并行。
流水并行 指将网络切为多个阶段,并分发到不同的计算设备上,各个计算设备之间以“接力”的方式完成训练。
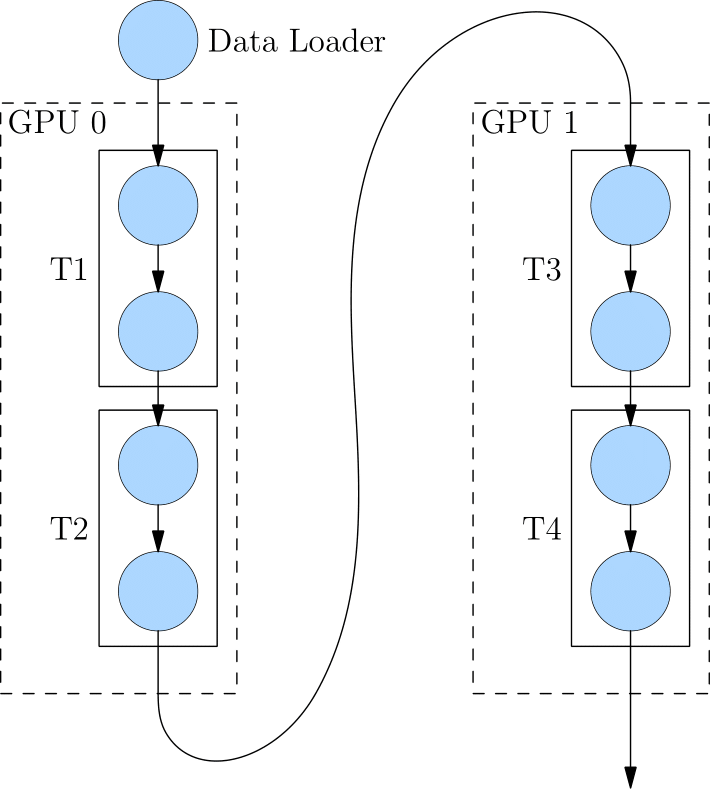
如下图,展示了一个逻辑上的 4 层网络 (T1至T4) 是如何做流水并行的。4
层网络被切分到 2 个计算设备上,其中 GPU0 上进行 T1 与 T2
的运算,GPU1 上进行 T3 与 T4 的计算。GPU0
上完成前两层的计算后,它的输出被当作 GPU1
的输入,继续进行后两层的计算。
8.2.4 混合并行
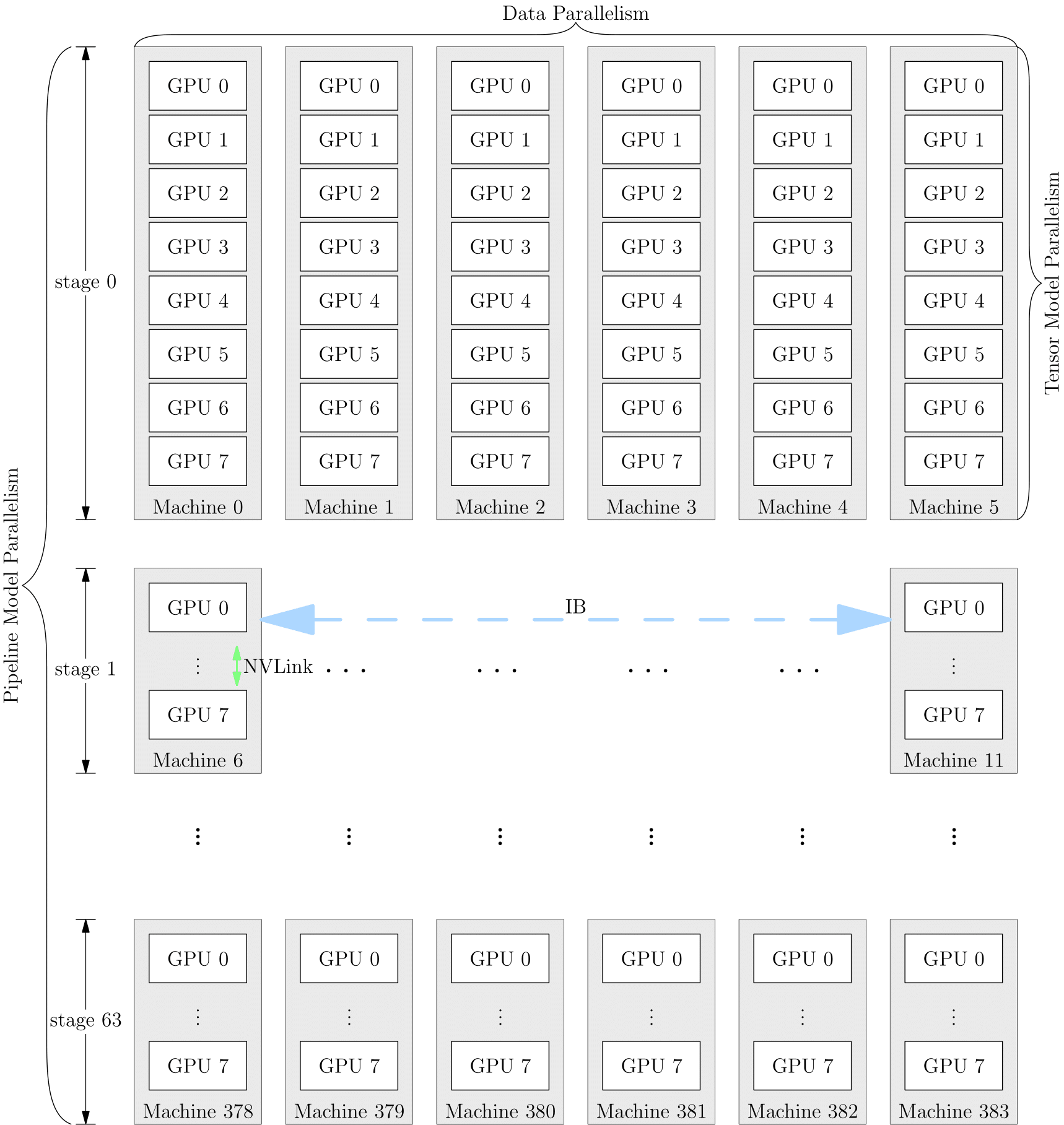
网络的训练中,也可以将多种并行策略混用,以 GPT-3 为例,以下是它训练时的设备并行方案: 它首先被分为 64 个阶段,进行流水并行。每个阶段都运行在 6 台 DGX-A100 主机上。在6台主机之间,进行的是数据并行训练;每台主机有 8 张 GPU 显卡,同一台机器上的8张 GPU 显卡之间是进行模型并行训练。
并行策略的选择影响着训练效率,框架对并行训练的接口支持程度,决定了算法工程师的开发效率。